|
return
to homepage
return
to updates
A
STUDY OF
VARIABLE ACCELERATION

by
Miles Mathis
First
posted December 20, 2009
Abstract:
I will analyze a textbook solution of variable acceleration,
showing that it is incorrect in both method and answer. It is
incorrect because it is solved improperly with integration when
it would be easier and more transparent to solve with the second
and third derivatives. Once again, I will show that the calculus
is taught upside down.
[Apparently
many readers have been mystified by this paper. They do not
comprehend my method, and assume I wrote it standing on my head.
But I stand by it. In my opinion, it is far easier and far more
transparent to solve for distance using the third derivative here
than by integrating. I honestly believe that if you penetrate
this paper, some important scales will fall from your eyes.]
In
previous papers I have shown many problems with the modern
calculus. In this paper I will show problems in applying the
calculus to variable acceleration. To do this, I will follow a
physics textbook solution line for line.
To start, we
must ask what we mean by a variable acceleration. It could mean
two things. One, it could mean that we were speeding up and
slowing down, so that our change in velocity was not constant.
That is not what I mean here. What I mean is an acceleration
represented by a power of 3 or more, as in the curve equation x =
t3.
That means that you take a constant acceleration and then
accelerate it. For example, you take your car out on the highway
and press down on the gas at a constant rate. If your foot and
engine work like they should, you will have created a constant
acceleration. Now, take that whole stretch of highway, suck it up
into a huge alien spacecraft, and accelerate the spacecraft out
of orbit, in the same direction the car is going. The motion of
the car relative to the earth or to space is now the compound of
two separate accelerations, both of which are represented by t2.
So the total acceleration would be constant, not variable, but it
would be represented by t4.
This is what I am calling a “variable acceleration”
here. It is not really variable, it is just a higher order of
change.
The acceleration would be represented by t3
if the alien spacecraft had a constant velocity instead of a
constant acceleration. An acceleration is two velocities over one
interval, so t3
is three velocities over one interval. Or, it is three changes in
x over one defined interval, say one second. We can write that as
either three x's or three t's, but it is common usage to use
three t's in the denominator instead of three x's in the
numerator.
The cubed acceleration can also be created in
a car, by increasing your pressure on the gas pedal at a constant
rate of increase. This will cause a cubed acceleration in the
first few seconds.
In engineering, a higher order
acceleration like this is called a “jerk” (though it
is usually applied to a negative acceleration, as in a jerk to a
stop). I call the positive acceleration a cition
in my first paper on the derivative, from the Latin “citius”.
As in the Olympics motto “citius, altius, fortius”:
faster, higher, stronger.
Because this sort of
acceleration is often called a variable acceleration in physics
textbooks, most people seem to think it isn't constant, and
therefore can't be averaged like the squared variable. But higher
powers can be constant, if they are created by a constant process
like the one I proposed above with the car and the spacecraft. If
the car and spacecraft are both accelerating at a constant rate,
the higher power total acceleration will also be constant. Just
because an acceleration has a power greater than two does not
mean it isn't constant. We will see how important this is below.
When I say that the acceleration is constant, I do not
mean that we can average the velocity. Yes, the velocity is
accelerating itself, so we cannot find the velocity at a given
time by averaging. We have to take the second derivative, not the
first. When I say the acceleration is constant, I mean that it
increases at a consistent rate. It is not fluctuating.
Now
let us look at all the problems encountered by modern
mathematicians in trying to analyze this situation. In physics
textbooks, the chapter on velocity and acceleration normally
comes very early. In my textbook1,
it comes in chapter 2. You don't need calculus for constant
velocity, but for “instantaneous velocity” you do, so
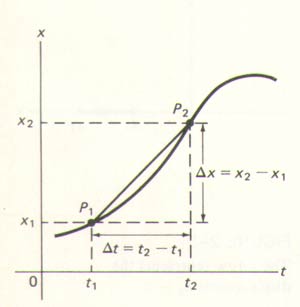
we get an entire subsection for that. To begin, we get a graph
plotting x against t and are given a curve (but no curve
equation).
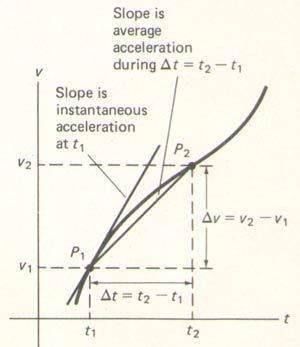
In
the next section, constant acceleration is covered, and we are
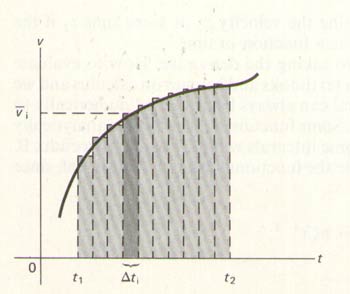
given a graph that plots v against t, with a similar curve. And
in the section after that, we find “variable”
acceleration. We are given a graph that again plots v against t,
with a curve.
We
should already have several questions. Since we are measuring the
curvature of these curves with the graph, and finding tangents
and areas beneath them, shouldn't our methods be analogous as we
go from velocity to acceleration to variable acceleration? In
other words, if we plot x against t in the first graph, shouldn't
we plot x against t in all the graphs? Or, by another method, we
would plot x against t in the first graph, v against t in the
second, and a against t in the third. That would keep our method
even and unchanged as we moved from one rate of change to the
next.
Instead, we find the textbook plotting v against t
when solving for a variable acceleration. This is not a quibble:
it must be important, because the curve determines the tangent
and the area under the curve. If you have a different curve, the
tangent and the area are different, too. Well, plotting x against
t will not give you the same curvature as plotting v against t or
“instantaneous a” against t, will it? If we are going
to differentiate or integrate, shouldn't we be careful to get the
right curve?
Another problem. All textbooks I have seen
solve problems of variable acceleration with integration. But
that is upside down. When
solving with respect to t,
you should differentiate down and integrate up. In other words,
if you are given an acceleration and you want to find a velocity,
you differentiate. The derivative of t2
is 2t, where t2
is the acceleration and 2t is the velocity. Conversely, to go
from a velocity to an acceleration, you integrate. The integral
of 2t is t2.
But in textbooks, they integrate from a velocity graph, and find
a velocity from a variable acceleration by integrating only once.
Since a velocity is two steps from a variable acceleration, they
should be seeking the second derivative, not the first integral.
To be even more specific, let me quote from the textbook:
If x is
given by x = At3
+ Bt, then v = dx/dt = 3At2
+ B. . .Then, since a = dv/dt, a = 6At.
What
the authors are doing here is preparing you to integrate. They
are showing you how differentiating works, and then preparing you
to reverse it in the upcoming problem. You probably don't see
anything wrong there, but as I pointed out in my paper on the
exponential derivative, modern calculus is a jumble. What the
textbook has done is take the first derivative and then the
second, as you see, but they have called the first derivative of
a variable acceleration a velocity and the second derivative a
constant acceleration. That is backward. Just look at the
equations: v = 3At2
+ B? Since when can you write a velocity as a squared
variable? Or, a = 6At? Isn't 6t a straight line on a graph?
That isn't an acceleration.
My initial reaction was that
this textbook author is just a nut, but by looking around me I
have found that all of calculus now “works” this way.
According to current wisdom, velocity is always supposed to be
the derivative of distance, and acceleration the derivative of
velocity, and that is what causes this horrible confusion. As I
showed in previous papers, Wikipedia and most modern sources
define the derivative like this, which is enough to raise Newton
from the grave. He would tell you that when
you are looking at the time variable,
velocity is the derivative of acceleration, not the reverse. When
manipulating t, you differentiate down and integrate up. When
applying the calculus with respect to t, you differentiate down
and integrate up.
Some will not see my point. They will
think I am the nut. They will say, “What in the devil are
you talking about? The first equation x = At3
+ Bt is
the
distance. That is what the book means by 'x is given by'. That
is what 'x equals' means, you dope!” But no, I am not the
dope, so pay attention here. This is where it all comes out in
the wash. The standard model and standard reply is wrong again,
since the equation x = At3
+ Bt is the curve equation on the graph, and it represents
a variable acceleration. That equation is not x, that equation is
the variable acceleration. You have been fooled by the “x=”.
Bear with me, please. Look closely at the equation x =
At3
+ Bt. The physical displacement x is not given by that equation.
That equation applies to the graph only. It is telling you an
x-distance from the y-axis at time t. The x in that equation
tells you what x you are at, at the given value of t, but it does
not tell you the distance traveled on the curve, since the curve
is curving. To say it another way, x in a curve equation does not
equal x in a physics equation. So x = At3
+ Bt will not tell you a value for total distance traveled after
t. If it did, we wouldn't need calculus at all, we could just
read the value for x right off the graph, for any and all curves.
But no, to find x you have to use physics equations, not curve
equations. The equation x = At3
+ Bt is a curve equation, and because it has a t3
in it, it must stand for a variable acceleration.
[Clarification,
June 2015.
I have finally understood that my claiming that distance is the
derivative of velocity is what has shut most readers down when
trying to understand this paper. We are all taught that velocity
is the rate of change of distance, and in other papers I even
admit that is true. So they don't understand what I am saying
here, by turning that upside down. They think I am just crazy,
or at least wildly inconsistent. But what I thought was clear
from the beginning is that I am trying to show that when
you are doing your calculus operations on the variable t,
you actually differentiate down from velocity to distance. You
take the derivative of t in the velocity equation to find the
distance—which means that in
this case,
the distance is derivative of the velocity. If you follow my
actual equations, you will see exactly what I mean, and why I am
right.
What I didn't
originally make clear is why
this is so. It turns out it is because t is normally in the
denominator. Being in the denominator in all equations of
motion, t naturally acts upside-down to x as a matter of
differentiation or integration. Not realizing this, the
mainstream has butchered many of these manipulations when they
are monitoring t. Any time they are finding anything “with
respect to t” they are failing to take this into
consideration.]
The entire modern interpretation of
the calculus is upside down in this regard! To show this, let us
look at the textbook solution of a specific problem:
Given
a = 7m/s3
and 2s, find v final from rest.
v = ∫(7m/s3)tdt
= (7m/s3)t2/2
= (3.5m/s3)t2
= 14m/s.
That
solution looks like a fudge to me, from the start. If the moderns
don't understand the foundations of the calculus, or how it
works, it is unlikely they will be able to apply it in a logical
and correct manner. In fact, the solution can't be right, because
in the math they have taken one
integral of time, to convert a variable acceleration to a
velocity. Since the velocity is two
steps of differentiation or integration away from the variable
acceleration, in the differential
table3
or in real life, that solution can work only by some sort of
accident or push or other miracle. But I will show that it
doesn't work. That solution is not correct.
But first let
us see why the textbook is integrating. We only have to look at
its own explanation [this follows the quote above, explaining
differentiation]:
The
reverse process is also possible. If we are given the
acceleration as a function of time, we can determine v as a
function of time; and given v as a function of time, we can
obtain the displacement, x.
The
textbook integrates because it believes it is reversing the above
process. But because I have just shown their first process was
upside down, this can't work. They thought they were going x→v→a
with differentiation, so now they think they are going a→v→x
with integration. But regarding the variable t, differentiation
is the process a→v→x. Differentiation goes down, and
integration goes up. They are trying to differentiate up and
integrate down, when with t you have to do the reverse.
One
more time, for good measure. We are given a curve equation, say y
= x3.
That is a curve
equation, so
it must stand for a curve. It does not stand for the point y or
the distance y, since a point or distance y cannot curve. The
only “y” it gives us is some vertical distance from
the horizontal axis at some value of x. But that is not the
solution for the distance traveled along the curve. Therefore it
is not the solution to any physics problem. The equation y = x3
is not telling us a displacement, given an acceleration. It is
telling us the acceleration.
Now let us solve the
problem, without using integrals. We will start with the
velocity. As I said, we need to find the second derivative, since
velocity is the second derivative of a variable acceleration. The
second derivative of t3
is 6t, so while the time is changing by the cube, the velocity
will be changing by 6's. You can see this clearly by taking the
lines out of my differential tables:
Δx3
= 1, 8, 27, 64, 125, 216, 343
ΔΔx3
= 1, 7, 19, 37, 61, 91, 127
ΔΔΔx3
= 6, 12, 18, 24, 30, 36, 42
ΔΔΔΔx3
= 6, 6, 6, 6, 6, 6
The first line is the cubed
acceleration, the second is the first rate of change of that
acceleration, and the third is the second rate. The second line
is (a sort of) first derivative of the first line, and the third
line is (a sort of) second derivative. We
are straightening out the curve.
So the third line gives us a velocity. You can see that it is
changing the same amount in between numbers. The differential is
constant. That is the definition of a velocity. You can see that
the velocity is changing by 6's. Its rate of change is 6. In our
current problem, its rate of change is 6t, and t is 2, so at t=2,
its rate is 12. Again, you can see that right from the table. The
second entry is 12. But we have an acceleration of 7, not 1, so
we multiply by 7 and divide by 2 (to take into account the first
halved interval). This gives us v = 42m/s.
v = ad2(t3)/2
= 3at
That is the new equation for velocity, given a
cubed acceleration. This is logical since we can derive the
current equation for normal (squared) acceleration in the same
way. The current equation is v = at. Current textbooks don't
derive that equation with calculus, they just take it as given or
derive it from the classical equation a = v/t. But we can now
expand it showing the derivative:
v = ad(t2)/2
= at
Since the derivative of t2
is 2t, we get the current equation. This means we can intuit the
velocity equation for an acceleration of t4
as
v = ad3(t4)/2
= 24at/2 = 12at
And v = ad4(t5)/2
= 120at/2 = 60at
I have shown a simple method for taking
higher order acceleration equations straight from my table of
differentials. No one has ever done this before, that I know of.
It is certainly not done presently, because, as I showed you,
current textbooks solve with integration.
Let us look at
the textbook's solution. They found v=14m/s, remember? I found
42m/s. I bet you think they are right and I am wrong, but I can
prove they are wrong very easily. An acceleration of 7m/s3
must be greater than an acceleration of 7m/s2,
right? A cubed acceleration is the motion of an acceleration, so
the distance traveled has to be greater. So let us solve the same
problem for a = 7m/s2
instead of 7m/s3.
Using current equations for constant acceleration, we find
v
= at = 14m/s.
They found the same final velocity for
7m/s3
and 7m/s2.
That is impossible. An object accelerated to a cube must be going
faster at all t's than an object accelerated to a square. That
much is clear to anyone, I hope. So the textbook solution is a
blatant fudge, one that doesn't even get the right answer.
We
can also use the differential table to find the distance here.
But first let use my velocity 42m/s to find a solution. Because
our acceleration is constant (or consistent), we can tweek the
old equations.
x = vft/2
= (3at)t/2 = 3at2/2
= 42m.
Going to the table, we see that the object is
moving 6 during each interval of 1. That is what 6, 6, 6, 6
means. Since our acceleration is 7, we just multiply. In doing
this, we are using the third derivative, like so:
x =
a(d3t3)t2/4
= 42m
To find a distance from a cubed acceleration, we
take the third derivative. We differentiate down
three times.
Let me clarify that. Some have not understood
what I am doing here. They have complained that I am treating the
acceleration as a motion constant and thereby trying to average
the velocity or distance over the elapsed time. That is not what
is happening. When I say that the object is moving 6 during each
interval, I should say subinterval. I do not mean that the object
is traveling 6 during each 1/7 of a second or something, the same
distance over each equal time. No, my third derivative is telling
us that the object is moving 6 for each constituent velocity, and
a cubed acceleration is made up of three of those. You really
have to study the tables to see what I am doing, and no one has
done that in centuries. The calculus hasn't been taught like
that, so my simple manipulations seem mysterious.
Let
us see what the textbook got:
To
get the displacement, we use x2
= ∫ v(t)dt with v1
= 0, v2
= 14m/s, and t2
= 2s.
x2
= ∫(3.5m/s3)t2dt
= (3.5m/s3)t3/3
= 9.33m
Again,
let us check that by comparing it to the solution for the
distance traveled after 2 seconds at 7m/s2.
Everyone agrees that the equation x = at2/2
works for constant acceleration, so we find 14m. The textbook
found a number less than that, therefore the textbook cannot
possibly be correct. A cubed acceleration must give us more
displacement after any amount of time than a squared
acceleration.
I have just proven that the textbook
solution is a fudge, in both method and answer.
Conclusion:
I have shown in a direct manner that modern physicists and
mathematicians do not know how to use the calculus. Anytime you
see a scientist integrating down from accelerations to distances
in this way, you know that madness is afoot. In
other papers I have shown that the calculus is misdefined,
and now I have shown that it is misused, even in simple problems.
Nor is this an isolated incident, since I have shown that
Wikpedia, as the mouthpiece of common wisdom, defines the
derivative up instead of down. Students are currently taught to
differentiate a distance to get a velocity and differentiate a
velocity to get an acceleration, when that is upside down. Since
all are equations of motion, motion is defined by time, and the
calculus is normally applied to the time variable (with respect
to t), we have to reverse that process. In most real operations,
we must differentiate a velocity to find a distance.
Given
this fundamental misunderstanding, we can now see why scientists
and mathematicians hide away in esoteric problems and esoteric
maths. They can't do simple math, either algebra or basic
calculus, so they must take cover under slippery operators in
slippery fields. If you had thought that the math in places like
Physical Review Letters was a big con game, you are right. Most
math is a con game, and that includes the simple maths you were
taught in high school and college. If the math in chapter 1 and 2
is false, you know the math in chapter 30 is false.
[For
more on this, you may now read my newest paper called Calculus
is Corrupt, where I show a major fudge first used by Lagrange
in the 1700's. It is directly related to the upside-down
calculus.]
1General
Physics,
Douglas C. Giancoli, 1984.
3http://milesmathis.com/are.html
If this paper was useful to you in
any way, please consider donating a dollar (or more) to the SAVE
THE ARTISTS FOUNDATION. This will allow me to continue writing
these "unpublishable" things. Don't be confused by
paying Melisa Smith--that is just one of my many noms de
plume. If you are a Paypal user, there is no fee; so it might
be worth your while to become one. Otherwise they will rob us 33
cents for each transaction.
|